S ono soprannominati treni proiettile ma forse sarebbe più azzeccato chiamarli treni martin pescatore poiché al becco di questo sgargiante uccellino si ispira il muso dei moderni treni ad alta velocità giapponesi. Fino alla metà degli anni ‘90 la velocità raggiunta dagli Shinkansen, capaci di superare i 300 chilometri/ora, si accompagnava a un serio difetto. Come il proiettile sparato dalla canna del fucile, all’uscita dai tunnel la pressione negativa generata al suo interno dal passaggio del treno esplodeva in un’onda sonora udibile per centinaia di metri di distanza. Un bel cruccio per chi abitava lungo i binari. La soluzione la trovò Eiji Nakatsu, appassionato birdwatcher, direttore del dipartimento di ricerca e sviluppo della società ferroviaria nipponica. Era a portata di binocolo: osservando la tecnica di caccia del martin pescatore, il cui tuffo fulmineo e privo di spruzzi lascia solamente un’invisibile increspatura sulla superficie dell’acqua, l’ingegnere trovò notevoli analogie con il suo problema. Come il martino si sposta rapidamente dall’aria all’acqua, così lo Shinkansen passa dall’aria aperta a quella all’interno del tunnel, che ha una resistenza maggiore. Con un aumento di diametro costante dalla punta alla testa, il becco del martino è un capolavoro di aerodinamica: anziché essere spinta in avanti, l’acqua scorre oltre il becco consentendo all’uccello di incunearsi al suo interno. Una caratteristica che Nakatsu riprodusse nei treni delle generazioni successive, che abbandonarono il muso a proiettile guadagnandone non solo in comfort acustico ma anche in prestazioni e consumi.
Mimi
Dalle macchine volanti di Leonardo Da Vinci alle mute che riproducono la pelle di squalo per migliorare l’idrodinamica, la Natura ispira da sempre le invenzioni dell’uomo. Solo negli anni Cinquanta, però, nacque il termine “bionica” per definire la disciplina che studia le funzioni sensorie e motorie degli organismi viventi allo scopo di riprodurle o potenziarle con dispositivi di vario tipo. Tre decenni più tardi fu coniato quello di “biomimesi” per indicare l’insieme di scienze che imita la Natura con l’obiettivo di migliorare attività e tecnologie umane.
Le prime macchine fototrope, capaci di riprodurre l’attrazione delle falene per le sorgenti luminose, risalgono alla seconda decade del XX secolo. Tuttavia, la nascita della biorobotica contemporanea è tradizionalmente associata alla presentazione della Machina Speculatrix del neurofisiatra britannico William Grey Walter, avvenuta tra 1950 e 1951. Per dimostrare come il funzionamento del cervello umano dipendesse dalle sue connessioni, Walter assemblò un veicolo a ruote mobili dotato di un guscio con rudimentali sensori ottici e tattili. L’interazione tra questi due sistemi permetteva alla tartaruga meccanica posta in una stanza buia di aggirare gli ostacoli fino a raggiungere la sorgente di alimentazione dove ricaricare la propria batteria. In assenza di stimoli luminosi, la tartaruga reiterava una serie di movimenti circolari finché la sua cellula fotoelettrica non era colpita da un raggio luminoso. Individuato il raggio, si dirigeva verso la sorgente. Una volta carica rifuggiva nuovamente dalla luce troppo forte e ritornava nel suo optimum costituito da un’illuminazione moderata.
Negli anni Ottanta fu coniato il termine“biomimesi” per indicare l’insieme di scienze che imita la Natura con l’obiettivo di migliorare attività e tecnologie umane.
Fuori dalla robotica, uno dei primi esempi di biomimesi consapevole risale addirittura al 1851 quando il botanico Joseph Paxton, esperto nella costruzione di serre, venne chiamato per ultimare il Crystal Palace di Londra, simbolo della prima esposizione universale della storia. La necessità di completare la vasta e ariosa struttura in tempi rapidi spinse Paxton a proporre una variante inedita, ispirata al mondo vegetale: i grandi archi di chiusura della facciata avrebbero ricalcato il disegno geometrico delle foglie della Victoria amazonica, la più grande ninfea esistente. Se il peso è ben distribuito, la sottile ma estesa rete di nervature della pagina inferiore può sorreggere il peso di una persona adulta senza rompersi o deformarsi. Le straordinarie capacità strutturali della V. amazonica non fecero la fortuna del solo Paxton ma furono in seguito adottate da altri architetti come Eero Saarinen per il terminal 5 dell’aeroporto JF Kennedy di New York e da Annibale Vitellozzi per il Palazzetto dello Sport di Roma.
Ma i vegetali non hanno ispirato solo l’architettura. Al regno delle piante guardano oggi con grande interesse anche al centro di Micro-BioRobotica dell’Istituto Italiano di Tecnologia a Pontedera dove, combinando una nuova generazione di tecnologie hardware e software, si progettano robot capaci di imitare il comportamento delle radici. “Le radici delle piante formano una estesa rete capillare che percepisce l’ambiente circostante raccogliendo dati. La loro modalità di esplorazione è plastica, capace di aggirare gli ostacoli e vincere attriti elevati”, spiega Barbara Mazzolai, coordinatrice del centro, il cui gruppo di ricerca ha applicato alla robotica il concetto del muoversi crescendo mutuato da questo organo vegetale. Nel plantoide sviluppato dall’IIT è la macchina a decidere, in base alle informazioni recepite dai sensori, quanto e in quale direzione svilupparsi, azionando di conseguenza la stampante 3D di cui è munita. “Il passaggio cruciale consiste nella semplificazione dei principi naturali che ci interessano senza per questo sacrificare la funzionalità” prosegue Mazzolai. Sebbene il plantoide nasca per agevolare il monitoraggio e la bonifica di siti contaminati, la sue innovazioni offrono numerose applicazioni, dall’esplorazione mineraria a quella spaziale passando per l’ambito biomedico.
Nuovi muscoli
Proprio in ambito biomedico la bioispirazione è oggi ritenuta imprescindibile. «In un vecchio film degli anni ‘60 un’équipe di chirurghi miniaturizzata si aggirava dentro il corpo del paziente a bordo di un sommergibile. In una decina di anni o poco più i microrobot terapeutici potrebbero divenire realtà» ipotizza Leonardo Ricotti, professore presso l’Istituto di Biorobotica della Scuola Superiore Sant’Anna. Un risultato sorprendente in un campo di ricerca inaugurato relativamente tardi rispetto ad altri. Dove servono tecnologie che non si limitino all’imitazione del corpo umano ma devono integrarsi con esso. Gli ostacoli da affrontare sono molteplici, a cominciare dalla scarsa flessibilità degli elementi artificiali, difficilmente deformabili e dunque limitati a una ristretta serie di movimenti. O dalla necessità di ricorrere a polimeri biocompatibili che ingannino il sistema immunitario per scongiurare rigetti. «Un altro problema è rappresentato dalle leggi di scala, che impediscono di creare attuatori, pompe e batterie più piccoli di qualche millimetro» prosegue l’ingegnere. Il modello da imitare non poteva che essere il tessuto muscolare. «I primi tentativi risalgono a una ventina di anni fa. Dall’approccio medievale di connettere a una macchina interi muscoli di anfibio si è passati a crescere singole cellule in laboratorio con l’obiettivo di sviluppare attuatori bioibridi. E quindi macchine delle dimensioni di poche centinaia di micron» spiega Ricotti. Nel breve periodo questo ribaltamento della prospettiva potrebbe arrecare benefici anche alla medicina rigenerativa, permettendo la ricostruzione di muscoli – compreso il cuore – colpiti da necrosi o patologie croniche.
Ragni nello spazio
La missione Apollo 15 portò sulla Luna il primo rover guidato dall’uomo. Dal 1971 a oggi, la locomozione di veicoli e robot utilizzati nell’esplorazione spaziale è sempre stata garantita da un numero più o meno ampio di ruote: mezzi che però risultano inadatti a superfici molto accidentate e del tutto inadeguati in ipotetici ambienti liquidi. Ecco perché, con l’obiettivo di perlustrare pianeti e satelliti lontani, le principali agenzie spaziali stanno valutando sistemi alternativi di locomozione.
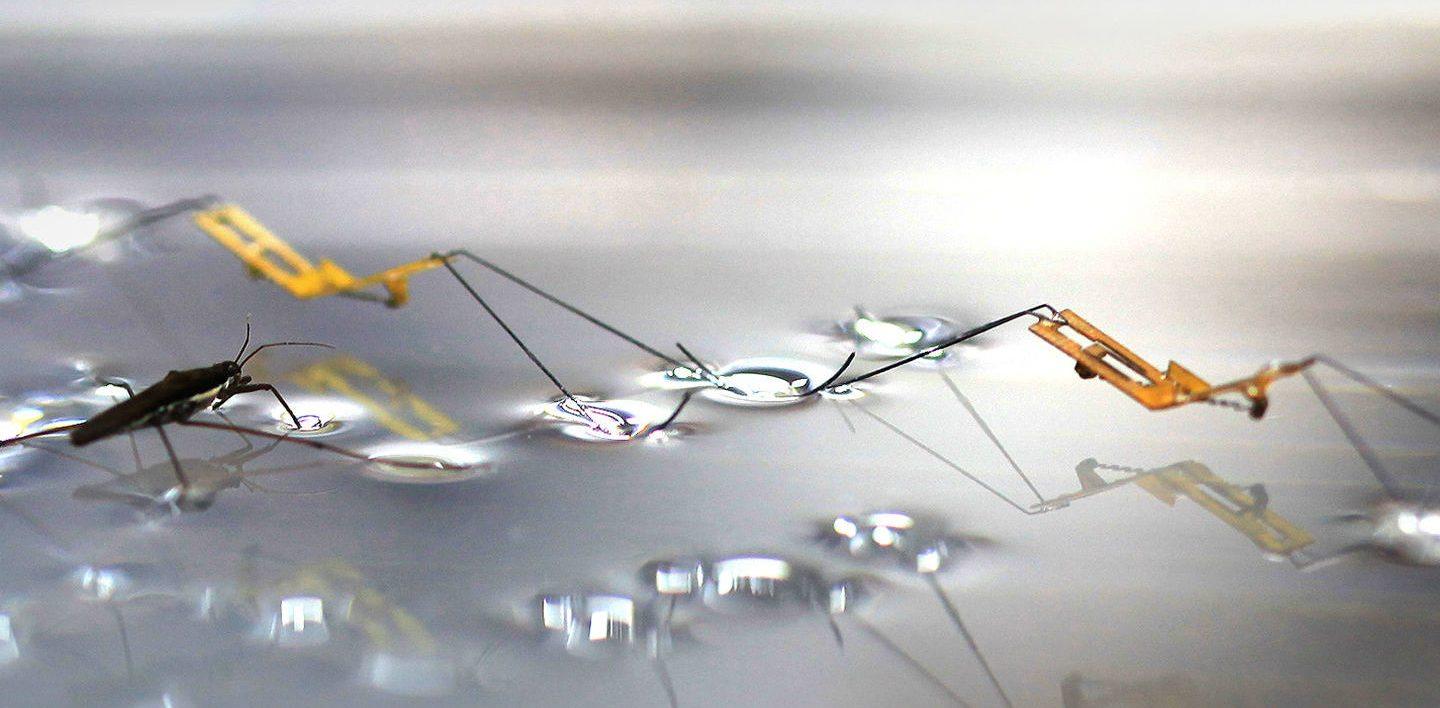
Ispirato alla stupefacente abilità di camminare sulla superficie dell’acqua propria dei gerridi, il robot Strider è mosso da un numero variabile di zampe rivestite di un materiale idrorepellente.
Parallelamente allo sviluppo di rover sferici, capaci di affrontare pendii ripidi senza correre il rischio di ribaltamento, si moltiplicano i prototipi a otto zampe che imitano le movenze dei ragni. Quelli che destano maggiore interesse appartengono a una famiglia che non costruisce ragnatele ma bracca attivamente le proprie prede, tanto da meritarsi la nomea di ragni cacciatori. L’eccezionale agilità di questi aracnidi, veri e propri funamboli delle dune, raggiunge il suo apice nel cosiddetto ragno rotolante, Cebrennus rechenbergi, che per sfuggire alle minacce compie una serie di esplosive capriole. Proprio al ragno rotolante è ispirato il robot Tabbot, nome berbero della specie, ideato dal Politecnico di Berlino. All’Istituto di Ingegneria Cibernetica di Trondheim guardano invece ai rettili: la struttura a moduli motorizzati del robot serpente Wheeko consente ai suoi diversi segmenti di penetrare e ispezionare anfratti altrimenti inaccessibili ai rover tradizionali. Tra i progetti frutto del programma Innovative Advanced Concepts della NASA c’è poi un rover anfibio pensato per l’esplorazione del satellite gioviano Europa, sotto la cui superficie ghiacciata potrebbe celarsi un oceano liquido.
Le strutture simili a tentacoli e la propulsione basata su variazioni del volume di gas contenuto nei diversi segmenti del corpo permetterebbero al rover di completare la missione anche qualora l’ambiente si dovesse rivelare diverso da quanto prospettato, e potrà nuotare in oceani liquidi oppure strisciare su superfici solide. Chi non ha bisogno di nuotare è Strider, il robot sviluppato all’Università Carnegie Mellon di Pittsburgh. Ispirato alla stupefacente abilità di camminare sulla superficie dell’acqua propria dei gerridi, noti anche come insetti pattinatori, Strider è mosso da un numero variabile di zampe rivestite di un materiale idrorepellente. Tuttavia, nel confronto, gli insetti rimangono più veloci e sopportano un carico di peso trenta volte maggiore di quelli del robot della Pennsylvania.
Oltre gli androidi
L’incessante progresso della tecnologia demolisce ogni giorno l’immaginario collettivo dei sofisticati replicanti antropomorfi descritti dalla fantascienza classica. “È noto che alcuni maestri di scacchi siano stati sconfitti da programmi informatici. Allo stesso modo, una ruspa può sollevare carichi impossibili per un operaio. Eppure, la ruspa non gioca a scacchi e i motori scacchistici non sollevano massi. L’uomo può fare entrambe le cose” spiega Roberto Cingolani, direttore dell’Istituto Italiano di Tecnologia, ricordando come il nostro cervello si sia evoluto per dialogare con l’apparato muscolo-scheletrico. “Per esempio, i neuroni coinvolti nella visione sono gli stessi che coordinano la presa degli oggetti. In una macchina questo è impossibile”. Come le Formula 1 per le autovetture di serie, gli attuali androidi sono una palestra di innovazione per lo sviluppo di macchine meno appariscenti che allevino l’uomo di compiti gravosi e attività ripetitive.
La bioispirazione è in questo caso solo superficiale: ginocchio, piede e busto difettano della congenita complessità delle giunture animali. “Per non parlare dell’assenza di conduttori e sensori superficiali: essendo rivestiti di alluminio l’interazione con l’ambiente circostante è del tutto assente. Vanno perciò dotati di componenti aggiuntive” commenta Mazzolai. Un esempio è il sistema di estensimetri e fibre di nitinol, una lega di nichel e titanio a memoria di forma, ideato dai ricercatori dell’Illinois osservando il funzionamento delle vibrisse di numerosi animali come gatti, topi e foche. Questi sensori tattili potrebbero trovare applicazione nell’orientamento in condizione di oscurità o nelle situazioni in cui radar e sonar faticano. Tuttavia, l’insieme delle componenti aggiuntive aumenta inevitabilmente il peso e i consumi del robot, a meno che le scienze dei materiali non riescano a conciliare struttura e percezione, come accade nella nostra pelle. Il dispendio energetico rimane infatti il limite più grande delle macchine attuali. “Se confrontati con l’efficienza degli esseri viventi, persino i robot più avanzati risultano primitivi: la potenza erogata da un atleta è di circa 1000 watt, appena sufficienti ad alimentare un piccolo laptop” chiarisce Cingolani. “In oltre 3,5 miliardi di anni l’evoluzione ha percorso traiettorie finalizzate all’ottimizzazione di strutture e materiali. La Natura ha un’ecletticità straordinaria, è difficile fare di meglio”.